可作为大专院校、中高职学生自动化专业、机电一体化专业、机器人专业、企业工程师进行机器人、数控加工、机器视觉检测、材料出入仓库进一体化组建工业4.0智能无人工厂培训,提高阶段综合性学习与训练。

产品概述:
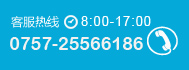
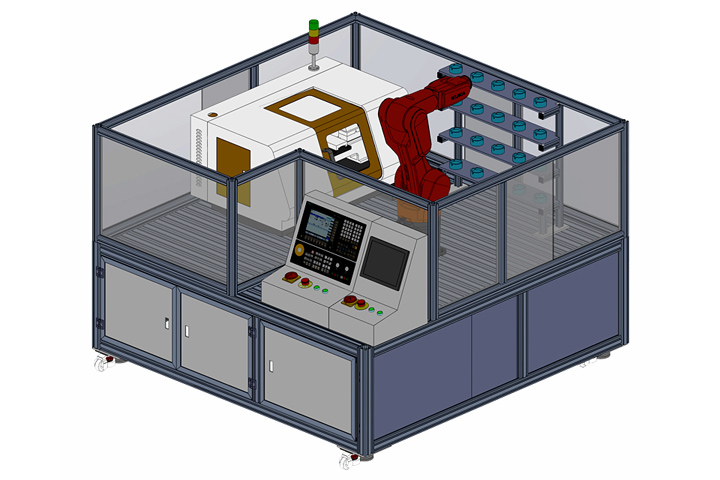
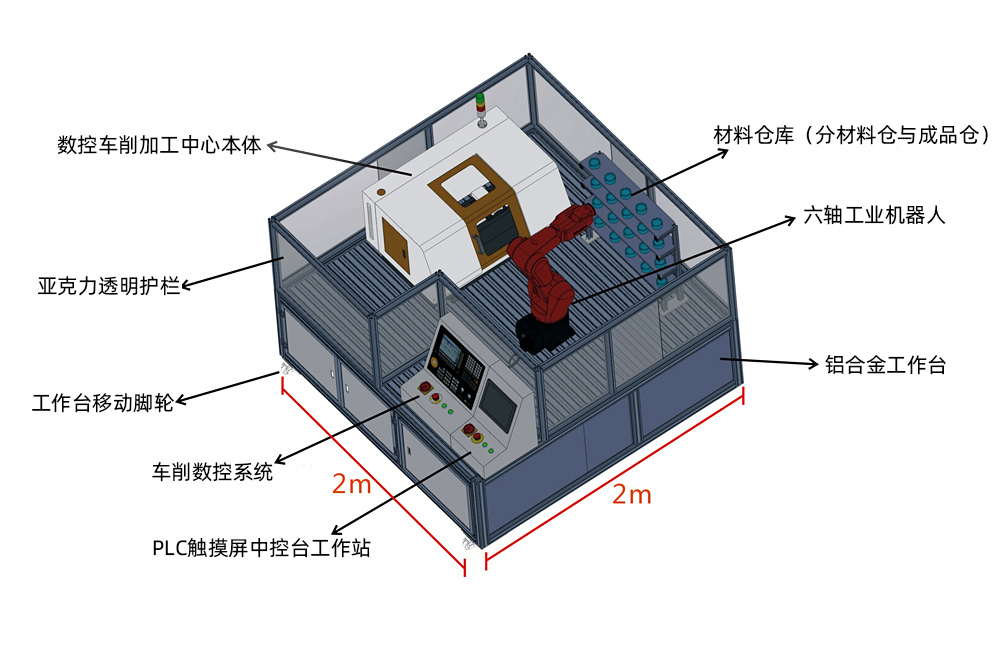
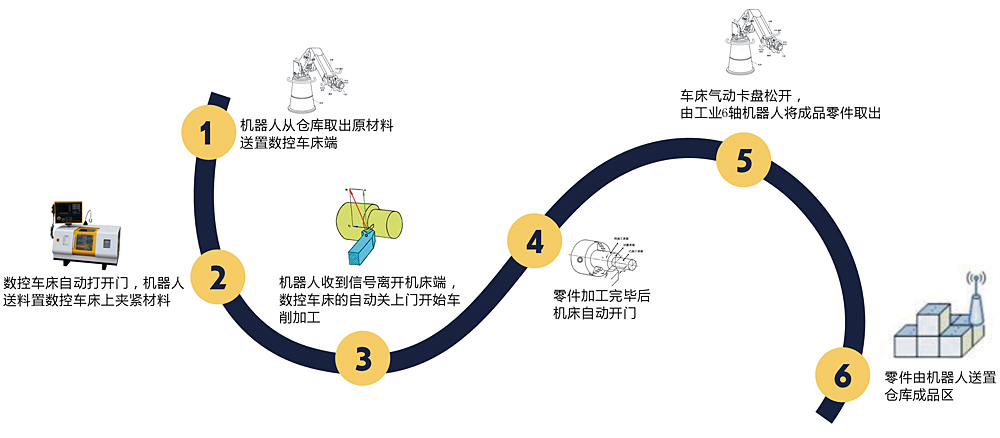
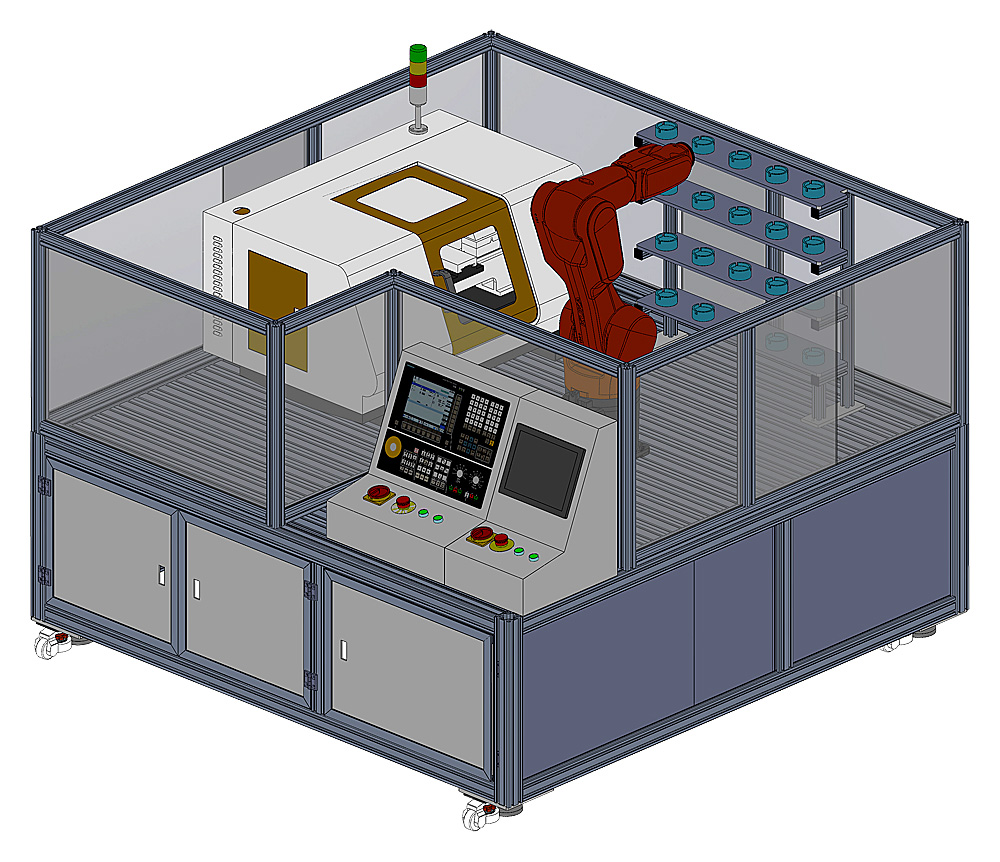
FMS工业机器人上下料教学实训平台以小型的柔性制造系统为载体,主要特点是占地空间小,是由一台工业6轴自由度机器人、一台柔性数控车床、PLC触摸屏编程模、材料仓库组成,实现自动化上下料无人工作站,机器人按指令给数控车床送料、取料;该系统能够实现工业机器人上下料工作站系统的编程、上下料系统的集成、PLC系统编程、通讯实训、机器人编程、数控编程、数控加工等环节。让学生轻松掌握工业6轴机器人与数控机床组建FMS上下料工作站加工系统,能满足学生对工业机器人学习及操作的需要,实现和工厂实际情况无缝对接,涉及的知识点丰富、综合,系统性强,学生通过该套系统的学习与训练,对智能无人工的组建整体性应用有全面的了解与体验。
序号 |
名称 |
数量 |
型号 |
1 |
工业6轴高速机器人本体 |
1台 |
YORNEW F006 |
2 |
数控车削加工中心本体 |
1台 |
CK210-FM |
3 |
材料仓库 |
1个 |
CS01 |
4 |
西门子PLC控制器 |
1个 |
6ES7 214-1HG31-0XB0 |
5 |
西门子PLC扩展IO模块 |
1个 |
6ES7 223-1PL30-0XB0 |
6 |
触摸屏中控台 |
1个 |
MT8102IP |
7 |
欧姆龙继电器模组 |
2个 |
BMZ-R1 |
8 |
电子手脉 |
2个 |
HLI6 |
9 |
车削工业级数控系统 |
1套 |
980TB |
10 |
XZ电机 |
2套 |
YORNEW 3205-1AF61-0LG1 |
11 |
驱动器 |
2套 |
YORNEW 3SL3210-650-5UA0 |
12 |
6轴机器人控制系统 |
1套 |
GR-C |
13 |
三爪气动卡盘 |
1套 |
SMC |
14 |
机器人气动夹具 |
1套 |
SH01 |
15 |
机床智能自动门推拉系统 |
1套 |
KIFL3 |
16 |
屏蔽电缆 |
3条 |
|
17 |
0.6帕空压机 |
1台 |
|
18 |
铝合金工作台 |
1套 |
长宽高1.8m*2m*1.2m,带透明亚克力护栏 |
19 |
PLC工作站单元 |
1套 |
YN201 |
序号 |
名称 |
数量 |
单位 |
设备简介及功能 |
1 |
六自由度工业机器人 |
1 |
套 |
(A) 设备特点 |
2 |
CK210-FM数控车削加工中心本体 |
1 |
套 |
(A) 设备特点 |
3 |
YN201 PLC工作站 |
1 |
套 |
设备特点 |
4 |
CS01仓库 |
1 |
套 |
立体仓库外围尺寸:750×730×153mm |
5 |
980TB车削工业级数控系统 |
1 |
套 |
通信功能: |
6 |
YORNEW F006六轴机器人控制系统 |
1 |
套 |
1)基于RC 总线的控制系统,控制器、驱动器等核心部件; |
7 |
铝合金工作台 |
1 |
套 |
带移动脚轮和脚杯 |